Le robot le plus rapide au monde est français

Une équipe de chercheurs de Besançon a réussi à développer un microrobot capable de procéder à 720 opérations de prise et dépose en soixante secondes.
C’est une prouesse mondiale et elle a été réalisée dans le laboratoire Femto-ST de Besançon (Doubs). Il s’agit du robot le plus rapide au monde. Baptisé MiGriBot (Miniaturized Gripper Robot), ce robot miniature est capable de manipuler des objets, à peine visibles à l’œil nu, à des vitesses et précisions jamais atteintes, selon son équipe de recherche, dont les travaux ont fait l’objet d’une publication dans la revue Science Robotics, le 25 août 2022.
Ainsi, il est capable de réaliser des opérations de prise et dépose d’objets submillimétriques, c’est-à-dire de 40 micromètres à plusieurs centaines de micromètres. Surtout, il est en mesure de procéder à 720 opérations de prise et dépose de ces micro-objets par minute, avec une précision inférieure au micromètre. Il faut savoir que les robots industriels de prise et dépose les plus rapides ne dépassent pas les 250 cycles par minute, rappelle l’équipe de recherche RoMoCo, composée de chercheurs et ingénieurs de l’université de Franche-Comté, Supmicrotech-ENSMM (École nationale supérieure de mécanique et des microtechniques) et du CNRS.
Japonais et Américains derrière les Français
A titre de comparaison, si le robot développé, en 2018, par l’université Harvard, à Cambridge, dans le Massachusetts (Etats-Unis), affiche une vitesse équivalente au MiGriBot français, il ne possède que trois degrés de mobilité et n’intègre pas la fonction de préhension. Au Japon, l’université de Tokyo a elle aussi conçu, en 2020, un robot miniature de prise et dépose, mais dont la vitesse ne dépasse pas les 72 opérations par minute sur une course de 60 microns.
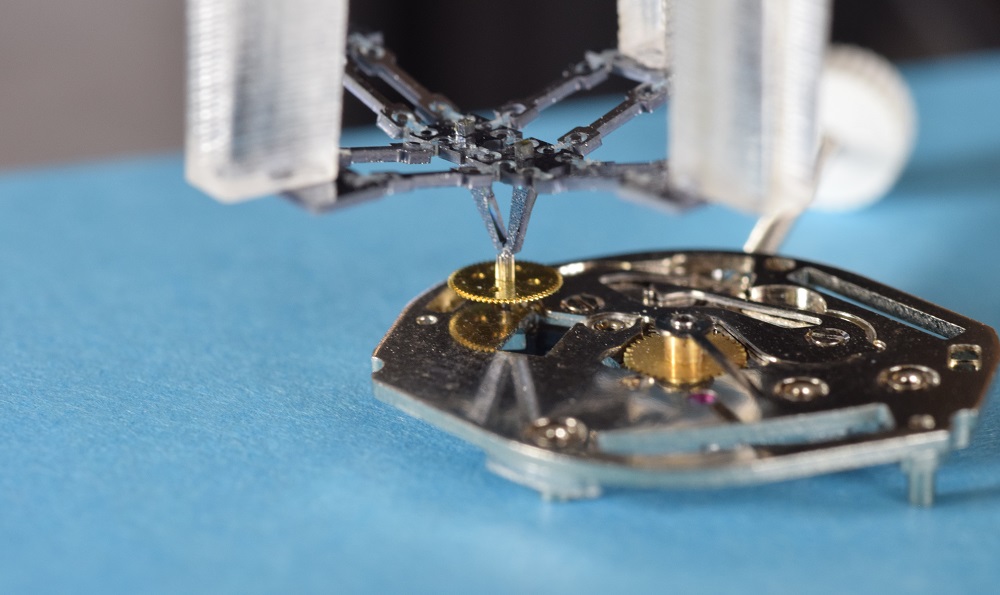
Le microrobot dépose un axe de mouvement d’horlogerie. (photo université de Franche-Comté)
Les robots industriels sont habituellement construits d’après une architecture sérielle, écrit le journaliste Kyrill Nikitine, dans CNRS Le journal, soulignant que tous les éléments constituant les bras mécaniques sont assemblés en série et disposés les uns après les autres, avec pour conséquence de limiter leur vitesse d’action. Tandis que le MiGriBot repose sur une architecture dite en « parallèle ». « Généralement, les robots combinent plusieurs systèmes, explique, dans la revue du CNRS, Redwan Dahmouche, à la tête de l’équipe de recherche RoMoCo. Les pinces sont par exemple toujours ajoutées de façon indépendante et sont un chaînon à part entière de l’ensemble. Tandis qu’ici, tous les éléments font partie intégrante d’un même système. » Ce qui permet de piloter une micropince sans aucun fil ni actionneur embarqué. Autre avantage : les éléments mobiles du MiGriBot, y compris la micropince placée sur l’extrémité articulée, sont actionnées depuis la base du robot.
Une architecture « entièrement repensée »
« Ce qui fait l’originalité de ce robot, poursuit Redwan Dahmouche, dans CNRS Le journal, réside donc dans l’architecture que nous avons entièrement repensée afin d’appliquer un tel cahier des charges à cette échelle. » Ce qui signifie qu’il serait possible de fabriquer en grande série des MiGriBot.
« La vitesse et la précision sont deux enjeux majeurs dans les systèmes automatisés de production et de l’industrie du futur », affirme l’équipe de recherche, qui souligne que son robot servira à « assembler des systèmes microélectro-mécaniques et optiques utilisés dans l’industrie de l’électronique où les besoins en cadence de travail sont de plus en plus élevés ». Ce nouvel équipement de production, si petit que l’on pourrait disposer 2 000 robots sur une surface ne dépasse pas le mètre carré, est une réponse aux enjeux de relocalisation de l’industrie en France et en Europe, et plus généralement dans les pays à haut coût de main d’œuvre. Il pourrait être utilisé dans l’industrie horlogère, l’instrumentation médicale, l’aérospatial, entre autres.
à propos de automatisation


 Vericut
Quand un logiciel d’usinage fait aussi baisser la consommation électrique des machines-outils
Vericut
Quand un logiciel d’usinage fait aussi baisser la consommation électrique des machines-outils

les plus lus

à lire aussi
![[Edito] Un savoir-faire local qui fait battre le cœur de l’industrie](https://www.machinesproduction.fr/wp-content/uploads/2025/12/shutterstock_150557984.jpg)